随着人工智能技术的飞速发展,智能机器人,特别是人形机器人,正从科幻想象逐步走向现实。如何突破技术瓶颈,实现规模化、商业化的落地应用,仍是整个行业面临的共同挑战。在这一背景下,伟景智能及其创始人董霄剑博士提出了独特的路径思考。
我们有幸与董霄剑博士进行了一场深度对话,探讨其在智能机器人,尤其是人形机器人领域的研发理念与实践。董霄剑认为,当前行业内许多研发力量正聚焦于构建类似视觉-语言-动作(VLA)的超大统一模型,试图通过海量数据和巨量参数来模拟和生成复杂行为。这条路径固然前景广阔,但其对算力、数据质量和训练方法的极致要求,也导致了研发周期长、成本高昂、系统鲁棒性验证困难等问题,短期内难以满足特定商业场景对可靠性、安全性和经济性的苛刻要求。
“我们选择了一条不同的路,”董霄剑解释道,“我们的核心思路是‘场景驱动,分层解耦,渐进智能’。” 具体而言,伟景智能的研发策略并非追求构建一个“通才型”的超级智能体,而是首先深入理解具体的工业、商业或服务场景的真实需求。他们致力于开发模块化、可解释性强的技术栈,将复杂的机器人任务分解为感知、认知、规划与控制等相对独立的层次,并针对每个层次设计高效、可靠的专用算法与硬件。
在感知层面,他们强调多模态传感器的深度融合与前端智能处理,力求在资源受限的嵌入式系统上实现低延迟、高精度的环境理解。在认知与决策层面,他们结合经典的符号推理与新一代的机器学习方法,构建针对特定任务的轻量化决策模型,确保行为的可预测性和安全性。在控制与执行层面,则专注于高精度、高响应的本体控制技术,使人形机器人能够稳定、灵活地完成抓取、行走、协作等动作。
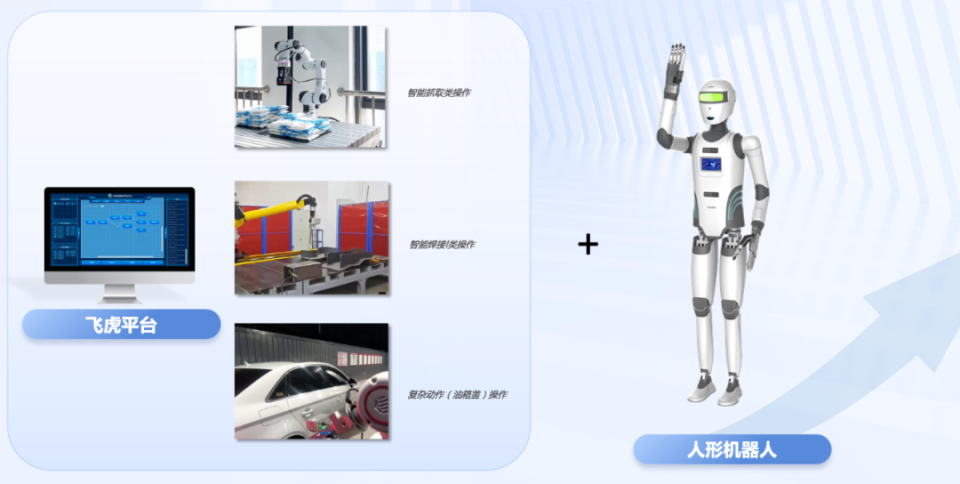
董霄剑强调,这条路径的优势在于“快速迭代与验证”。通过聚焦垂直场景,团队能够迅速将技术原型转化为可用的产品模块,在实际环境中收集反馈、优化性能,从而实现技术的持续进化与商业价值的闭环。例如,在工业质检、物流分拣、高危环境巡检等场景,其人形机器人解决方案已开始进行试点应用,展现了在非结构化环境中替代或辅助人工完成复杂操作的潜力。
谈及董霄剑表示,伟景智能并不会完全排斥VLA等前沿方向,而是将其视为长远的技术储备。当前阶段,务实的态度更为关键。“让人形机器人走出实验室,真正创造价值,需要的是在特定领域内做到极致可靠和成本可控。我们相信,通过这种‘由点到面’、‘从专用到通用’的渐进式发展路径,能够更扎实地推动人形机器人的商业化进程,最终为智能制造、社会服务等领域带来深刻变革。”
这场对话揭示出,在智能机器人的澎湃浪潮中,除了追逐宏大技术愿景,同样需要像伟景智能这样基于深刻场景洞察的务实创新。多条技术路径的并行探索,或许正是推动整个产业走向成熟与繁荣的关键所在。